
Abstract: Nowadays, the limitations of robot embedded hardware (which cannot be upgraded easily) make difficult to perform computationally complex tasks such as those of high level artificial vision. However, instead of […]
Read more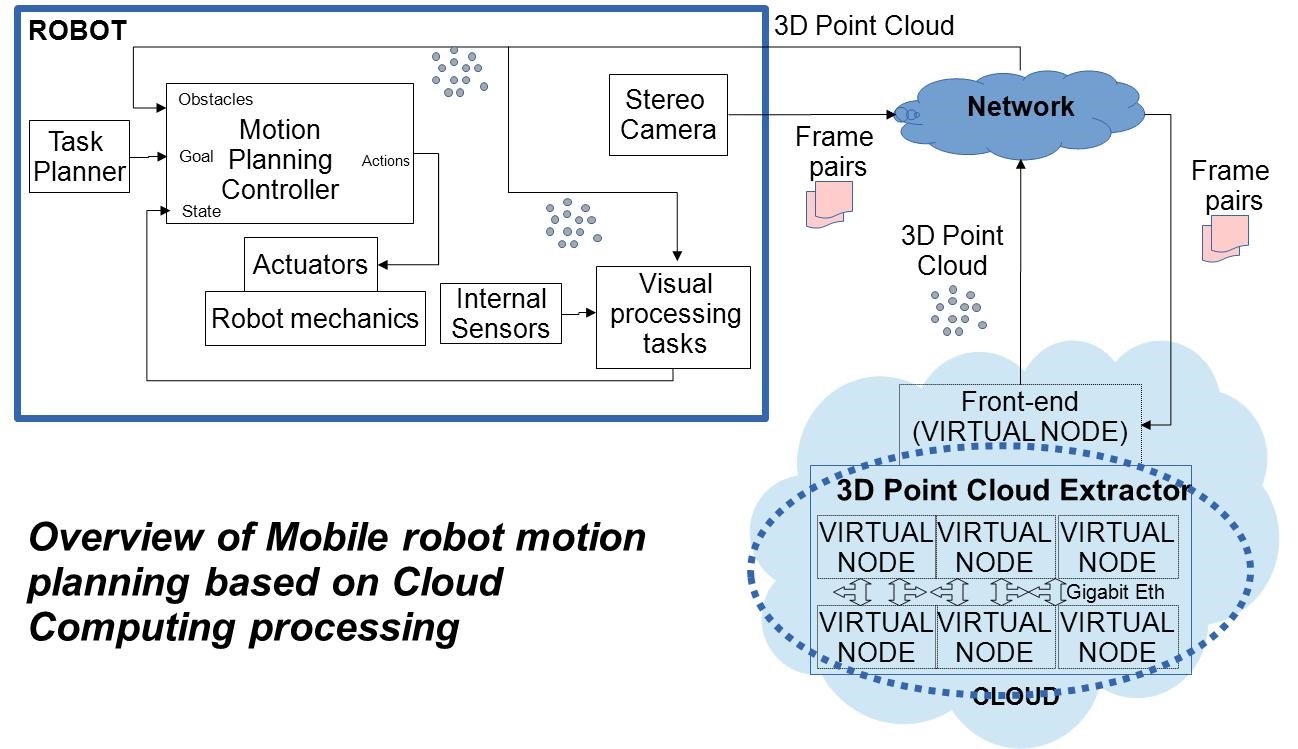
Abstract: Nowadays, the limitations of robot embedded hardware (which cannot be upgraded easily) make difficult to perform computationally complex tasks such as those of high level artificial vision. However, instead of […]
Read moreAbstract: A shared control method, called Shared Control Dynamic Window Approach, is presented. It is inspired in the Dynamic Window Approach (DWA) for autonomous mobile robots. It takes user commands by […]
Read more
Swiss National TV reported last Thursday, 8. May 2014 in their science dedicated television programme “Einstein” on GameUp. You will find the video on the following link: http://www.srf.ch/player/tv/einstein/video/sturz-risiko-senioren-wappnen-sich-mit-computer-spielen?id=0fba7b39-bd31-48df-a905-b4cf305c282a
Read more
In 90’s members of RTC Lab start to develop several tools for helping people with disabilities with projects such as “Tetranauta I: Intelligent Control Unit for Standard Electric Wheelchair”, “Tetranauta […]
Read more
One of our paper: Robotics software frameworks for multi-agent robotic systems development is in the list of Most Downloaded Robotics and Autonomous Systems Articles in the last 90 days. http://www.journals.elsevier.com/robotics-and-autonomous-systems/most-downloaded-articles […]
Read more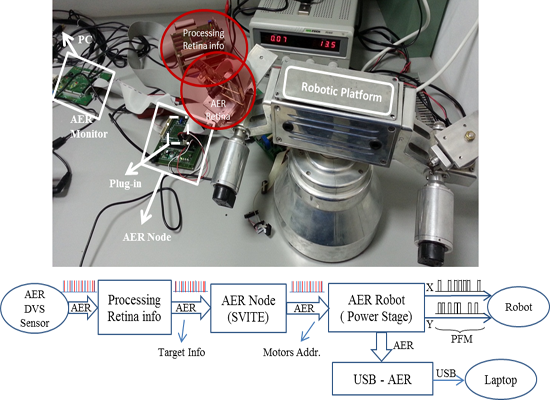
Abstract: In this paper we present a complete spike-based architecture: from a Dynamic Vision Sensor (retina) to a stereo head robotic platform. The aim of this research is to reproduce […]
Read more
Next video shows a fully neuromorphic system, that uses spikes from sensor to motors.
Read more